engineering encounters
Placemat Instructions
The development of a new type of instructions for learning engineering practices through robotics
Science and Children—January/February 2023 (Volume 60, Issue 3)
By Sara Willner-Giwerc, Rachel Hsin, Sonia Mody, and Chris Rogers
Robotics is often used as a means for teaching students engineering concepts. From learning the engineering design process to teaching gear ratios, robotics offers a hands-on way for students to create functional solutions to real-world problems while also engaging in three-dimensional learning. All Next Generation Science Standards (NGSS) have a three-dimensional design in which each standard has: (1) a discipline-specific core idea (DCIs), (2) crosscutting ideas that span all domains of science, and (3) practices that describe behaviors in which scientists and engineers engage (NGSS Lead States 2013). The current way that most robotics lessons are designed does not typically allow for full engagement in three-dimensional learning. Often, robotics interventions leverage step-by-step instructions, where every student builds the same robot. Step-by-step instructions lead students to replicate the knowledge of others rather than thinking for themselves. A common alternative to step-by-step instructions is more open-ended robotics challenges. However, these open-ended challenges present a high barrier to entry for teachers who may not know where to start and are faced with constraints such as short class times, limited resources, high student-to-instructor ratios, and limited experiences/training in open-ended teaching (Khanlari 2016). At the Tufts University Center for Engineering Education and Outreach (CEEO), we are designing new robotics resources that support a diversity of solutions distributed across a classroom. We define solution diversity as the number of different solutions to an engineering problem students in a class are able to generate. Rather than determining success based on the solutions of individual students/student groups, solution diversity takes into account the variety of ideas spread throughout a class. Most robotics challenges already have strong connections to disciplinary core ideas and crosscutting concepts; however, step-by-step instructions limit students’ engagement in science and engineering practices. We believe that if we can design instructional tools that inspire students to create their own robotic solutions to engineering problems, they will be fully engaged in practices such as iteration, critical thinking, and collaboration with peers. In this design case, we are sharing a new format of robotics instructions called “placemat instructions,” how we designed them, and what kind of experience they lead to in the classroom.
Designing Placemat Instructions
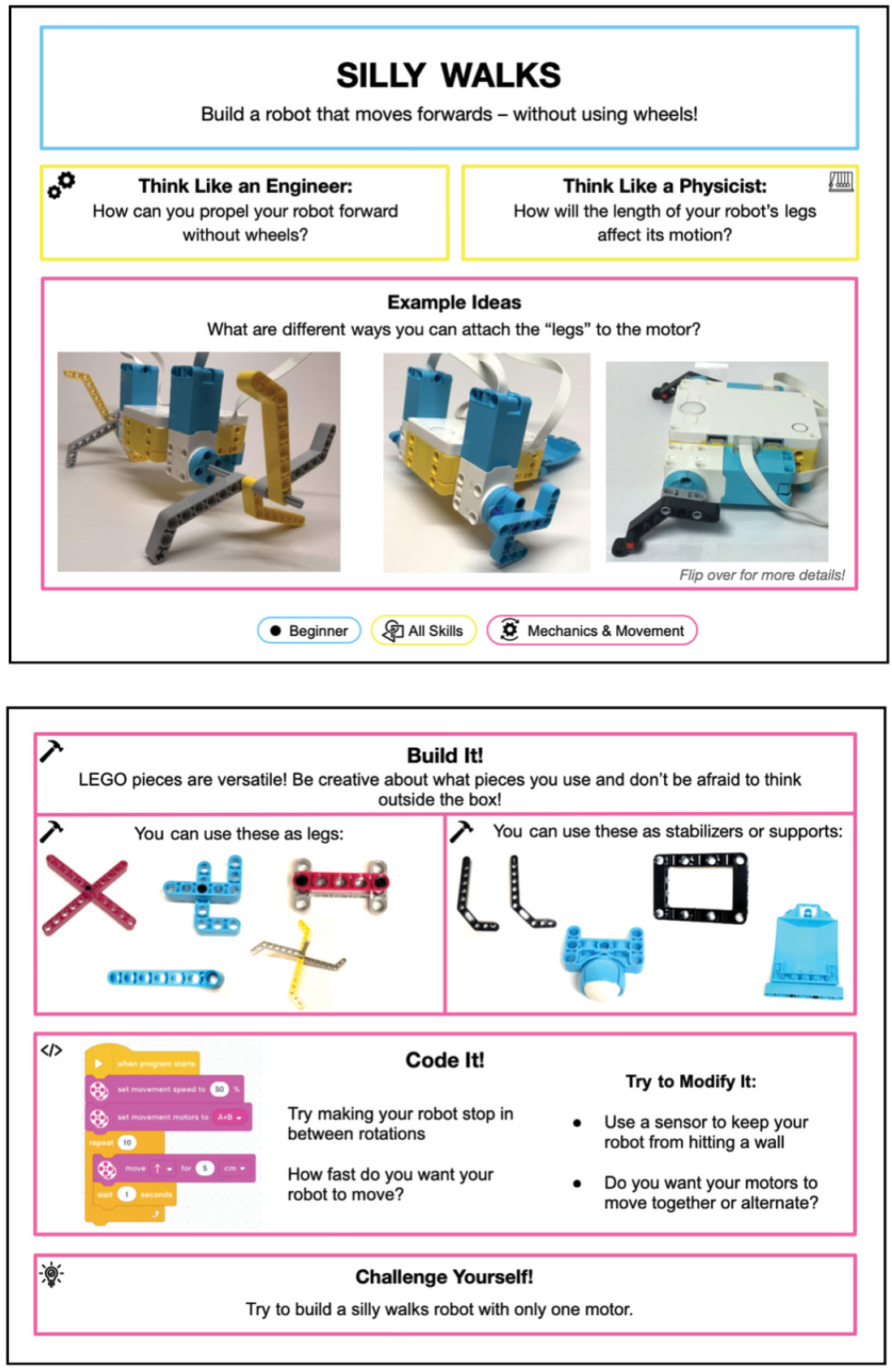
The placemat under your plate at a restaurant is great for a quick drawing or just keeping messy eaters from staining the table. Placemat instructions are similarly meant to be part of the classroom experience and used in multiple ways to scaffold student and teacher participation throughout a (sometimes messy) robotics challenge. Placemat instructions (Example shown in Figure 1) provide inspiration by giving students three images of example builds and some samples of code but do not give step-by-step instructions or prescribe one “correct” solution.
While the idea of challenge cards for robotics prompts is not new, most existing formats direct students to all build the same robot or provide a design prompt without offering help or examples. We know that students are only willing to venture a certain distance from their comfort zone without supports (Vygotski 1978). Therefore, placemat instructions are intentionally designed with the goal of helping facilitate solution diversity in classrooms while simultaneously supporting students and teachers alike throughout the problem-solving process.
Every placemat instruction contains five zones: (1) title zone, (2) example zone, (3) building zone, (4) coding zone, and (5) extension zone. This placemat instructions format is the result of over two years of classroom testing and iteration based on research. Each zone is designed to offer a different level of support for learners. Zone one shares the title of the activity and a one-sentence description of the engineering challenge students are being asked to solve. It also contains two “think like a” sections, which provide thought-provoking questions about how knowledge from different disciplines could be incorporated into the challenge. The goal of these sections is to prompt students to apply knowledge from the STEM fields and beyond in constructing their robotic solutions. The example zone shows three different potential solutions to the design challenge. The goal of showing these three examples is to show students different ideas about how they could solve the challenge without implying that there is one “correct” way. The next two zones are located on the back of the placemat instruction. The building and coding zones are designed to provide students with more support. The building zone provides more detailed images of how we created some of the example solutions. The goal is to help students who may initially want to replicate an existing build or need some hints for getting started. Similarly, the coding section provides students with an example code that they can choose whether or not to use. We also provide ideas for how to modify the example code for students who may not know where to go next. Last, the extension zone provides users with an idea of where they can go next once they have completed the challenge.
Using Placemat Instructions in the Classroom
To use placemat instructions with your students, we recommend starting by handing out the placemat instructions with the robotics kits your students are using. Several students may share a kit, each with a placemat. This design case highlights placemat instructions for the LEGO Education SPIKE Prime kit: a robotics set that combines LEGO building elements with a smart programmable hub, motors, and sensors. However, we have also designed over 50 placemat instructions for other educational robotics technologies such as micro:bit, LEGO WeDo, and LEGO MINDSTORMS EV3 (these can be found at www.ceeoinnovations.org/RoboticsPlayground/index.html). All of the placemat instructions we’ve developed are free to use. We recognize that the price of LEGO robotics kits may be prohibitive for many classrooms, and we hope in the future to add placemat instructions to our library for lower-cost technologies.
When using placemat instructions in a classroom, we first direct students to the placemat instruction and introduce the challenge. We take this initial opportunity before students have started brainstorming or building to situate the challenge in a context and connect the activity to what students may be learning about in other subjects. Let’s use the Silly Walks placemat shown in Figure 1 as an example. When doing this challenge, we first ask students to brainstorm different ways that animals move around (e.g., hopping, slithering, walking, crawling) and connect science concepts such as biomimicry, evolution, and adaptations to the challenge. Next, we prompt students to think about why building a robot that doesn’t use wheels but instead uses another mode of movement might be useful. After having a short (10 minutes or less) discussion relating to the prompt, we then invite students to start building, iterating, collaborating, and testing.
The Student Experience
Let’s zoom in on the student experience to better understand how placemat instructions are useful for facilitating engagement in engineering practices in the classroom. When students first take a look at the placemat instructions, they will see the challenge title and prompt as well as some example ideas (zones one and two). If they don’t need any further help, they can feel free to jump into the challenge. However, if they are unsure of how to get started or need more help, they can turn to the back of the placemat for more specific building tips and help with coding (zones three and four) (Willner-Giwerc, Dahany, and Rogers 2021).
When using placemat instructions with students, either in classrooms or in out of school settings, we observed several trends. A key theme we noticed was that students were not only learning key engineering and crosscutting concepts (such as considering design criteria and the impact their solutions may have on the world around them) but also engaging in engineering practices (such as asking questions and conducting investigation-based iteration). This engagement was especially pronounced when we contrast the practices that students deployed when using the step-by-step instructions with the practices they engaged in when they used a placemat instruction. The key behavioral differences we observed fell into the following two categories: iteration and collaboration/communication, both of which encompass several of the NGSS engineering practices standards as well as engineering disciplinary core ideas.
The following examples of the student experience with placemat instructions were taken from a robotics workshop taught over Zoom. Four participating elementary school students (ages 7–12) were shipped the robotics kit with the placemat instructions inside. Students were paired virtually in groups of two based on age and spent one hour a day for four consecutive days on Zoom with an instructor, who guided them through one activity each day, sometimes using step-by-step instructions and sometimes using placemat instructions. While not a traditional classroom, the examples we captured of students iterating and collaborating are aligned with what we’ve noticed previously in traditional classroom settings.
Iteration
Iteration in the engineering design process is when students change or improve their design based on a test or new idea in an effort to improve or optimize their solution to a problem. It’s been shown that a key difference between novice and expert engineers is when and how often they iterate when solving a problem (Atman et al. 2007). Thus, helping students learn how to iterate early and often is an important engineering practice to foster in classrooms. Additionally, iteration is a key component of the NGSS science and engineering standards (3-5-ETS1-2).
We observed that students iterated over twice as much, averaging 25 iterations per challenge, when using the placemat instructions compared to when using step-by-step instructions. These iterations were often driven by self-started and self-directed investigations and understanding of science concepts, such as launch angle. One example of this was Phillip’s ball launcher experience. During the ball launcher challenge (for which students used a placemat instruction), Phillip spent the early part of the session building a large basket to securely hold the piece being launched (see Figure 2A). When Phillip attempted to run the motors to fling the basket, he found that “This is too heavy...so the motors won’t move it [pointing to basket],” at which point the instructor suggested trying to shed some weight.
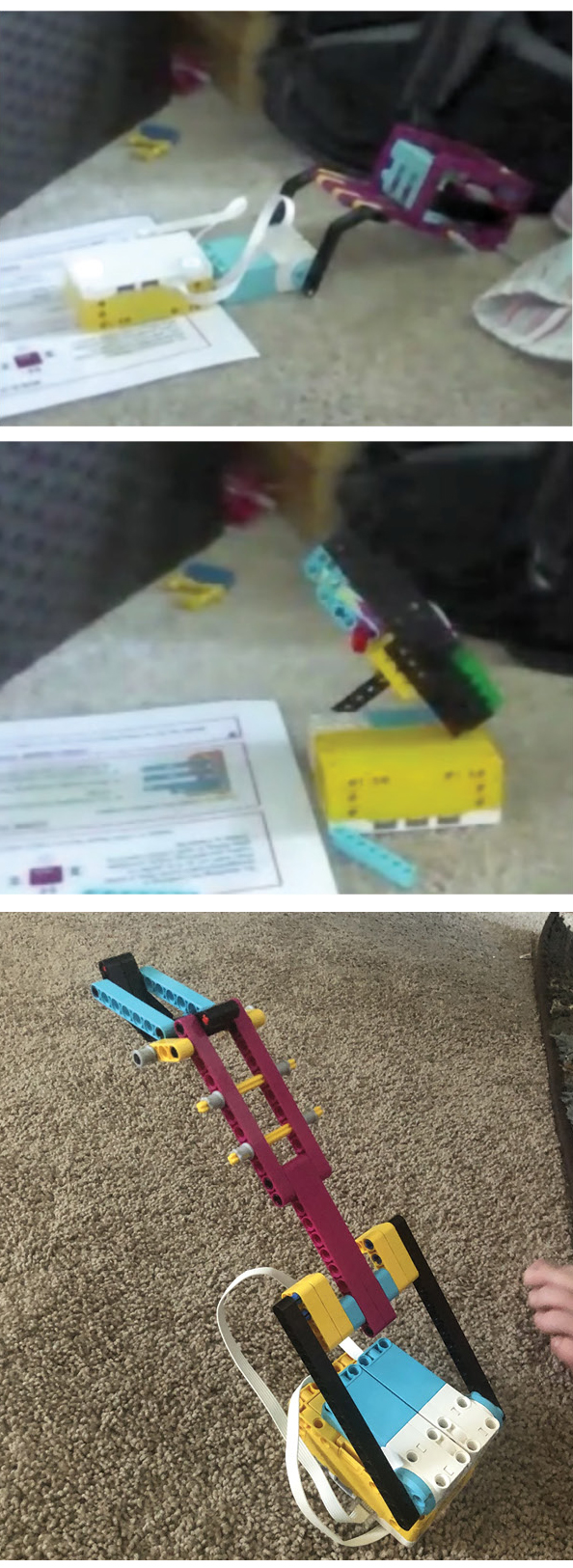
(top) Phillip’s first ball launcher with a heavy basket. (middle) Philip’s second iteration with a smaller basket and shorter arm. (bottom) Philip’s final ball launcher.
Phillip then iterated several times (Figures 2B and 2C) to eventually produce a launcher that could shoot a LEGO piece more than four feet. When asked on the last day of the robotics intervention which activity he felt he did the most engineering in, Phillip reflected: “I mean the ball thrower. Because that one like if it didn’t work you would just try over and over again. And that was the hardest, and you … like you built your style almost.”
Communication and Collaboration
Communication is another essential skill for engineers. A key component of any classroom engineering intervention should be that sharing ideas and working with peers ultimately leads to a better engineering solution (3-5-ETS1-2). We measured instances of collaboration by the number of times students initiated a conversation with each other about the robots they were building. When using a placemat instruction, students collaborated with peers an average of 8.6 times per challenge, compared to only 3.25 times per challenge when building from step-by-step instructions. We’ve observed that when students build from step-by-step instructions, all of the communication centered around what step people were on or where to find a specific piece. The types of communication that occurred when students used the placemat instructions were more varied, including students asking each other questions about how to construct parts of their robots and about their code, and students working together to get their robots to somehow interact with each other.
One example of students helping each other with robot construction was when Alexa and Clara were working on the ball launcher challenge. Alexa, unprompted by the instructor, helped Clara make a more secure ball holder for her launcher (see Figures 3A and 3B).
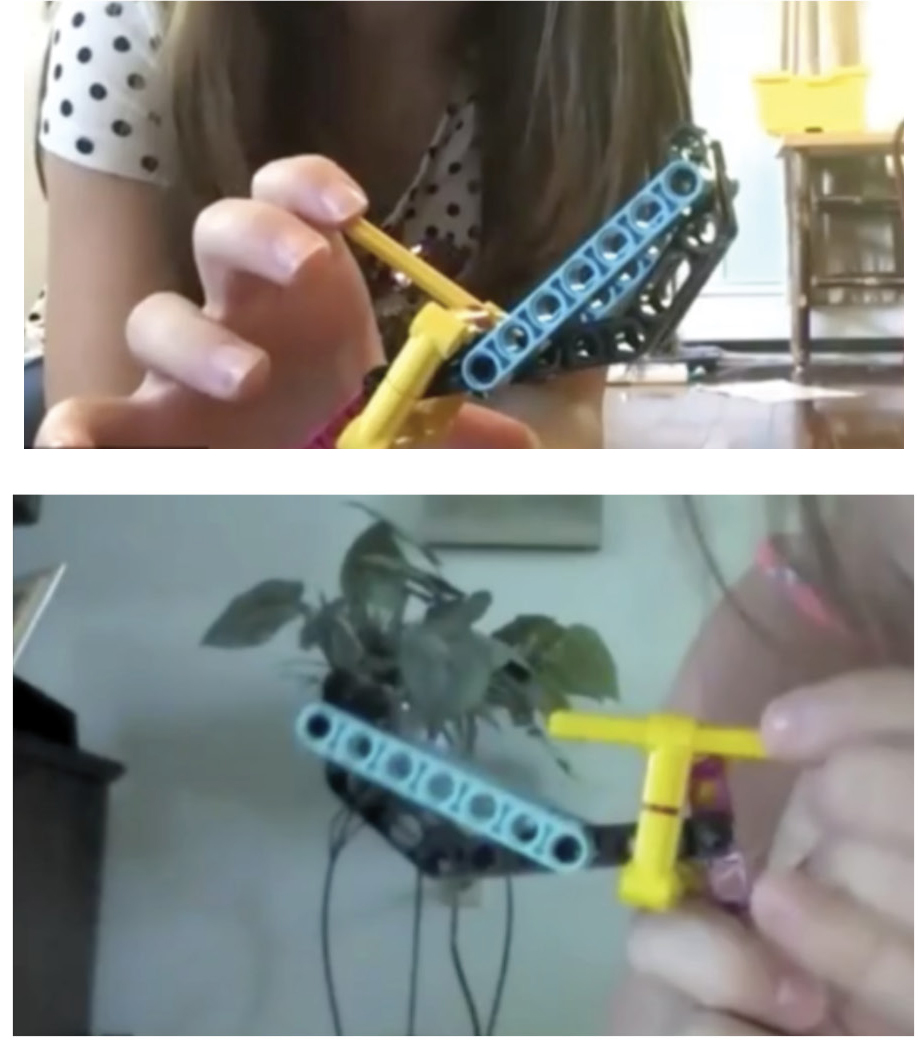
(top) Alexa’s ball holder explaining to Clara what to do. (bottom) Clara’s ball holder after Alexa’s help.
Clara: So, Alexa what did you do?
Alexa: I did something to mine. So, like before it was a really long thing, but then I put this little piece on there and it helped a lot …
Clara: Oh that’s a good idea! Let me try that really quick.
An example of students helping each other with their code was how Phillip helped Frankie figure out how to get his robotic drum (Figure 4) to play more than one time:

Frankie’s robotic drum.
Frankie: It’s working it … I have to figure out how to get it to go again … like backup and then do it again.
Phillip: Oh, so like do the same code you did but just switch the direction. [Showing code on iPad] So this is what I did, I did like, I switched directions for it to come back.
Frankie: Alright, that’s cool. So, basically, I did one direction and go the other direction.
Phillip: Yeah but the same amount of time. So, I did time, not degrees. So, I did like, I did run right for 0.5 seconds and then run back for 0.5 seconds and then I put in a forever block around it so it will just keep on going.
Our final example of students collaborating was when Phillip and Frankie decided to work together to get their musical instruments to play for the same amount of time and then trigger an applause sound effect to create a “virtual concert.”
Phillip: Oh yeah we need the applause
Frankie: Alright, instead of the forever I think I’m going to do like a 10 minute or a 10 times or something, and then so I’m going to try that
Phillip: So yeah Frankie, instead of forever you want to do a repeat 10 times?
Frankie: Yeah that’s what I was thinking as well, and then we can …
Phillip: then we’ll do the applause
Frankie: Yeah good idea
Phillip: Does 10 times work for you?
Frankie: Yeah we can do 10.
As illustrated by this exchange between Frankie and Phillip, the placemat instruction facilitated an experience in which students applied their knowledge of coding structures (loops) and worked together to achieve a desired outcome.
Teacher Tips for Using Placemat Instructions
Placemat instructions are also a tool for teachers. All placemat instructions are shared in a Google Slides format. This means that every available placemat in our library can be copied and edited to better meet the needs of English language learners and/or students with special needs.
A common challenge we’ve both experienced and observed when running robotics activities is that students/student groups may complete the challenge at different speeds, thus forcing the teacher to find ways to keep some students engaged while helping others catch up, all while answering troubleshooting questions. The placemat instructions can help address all of these challenges and make differentiated instruction easier to implement. For students that finish early, the extension zone provides ways that they can continue their robotics exploration. We’ve heard from teachers who have used placemat instructions in their classroom (and noticed in our own robotics clubs) that students will independently transition from the main challenge prompt to the extension challenge. This helps free up the teacher to address other questions and work with learners who may be struggling. The placemat instruction building and coding zones are designed to help students who may want to replicate an existing build or code to get started. When students are struggling, the placemat instructions can be a useful tool for re-engaging them or helping them get started. We often help refocus students by suggesting that they replicate the build or code shown on the placemat instruction as a starting or re-starting point. Placemat instructions are also helpful for when students may get frustrated or off task. Having a resource to direct student attention to in these situations can help them stay on task and feel successful in completing the activity.
While placemat instructions are a useful classroom tool, they are not an entirely stand-alone resource. As discussed earlier in this design case, the placemat instruction is designed to be integrated into existing classroom practices. The goal of the placemat instruction is to support teachers and students in using robotics in the classroom, but they do not replace the role of the teacher in facilitating discussion, asking students to document, or connecting to other subjects. What the placemat instruction does is eliminate some of the stress of using what may be an unfamiliar and challenging technology in a way that doesn’t eliminate the opportunity for students to think like engineers. Placemat instructions also help with classroom management because the teacher is no longer the sole source of help, as the placemat instruction can support students in helping themselves and their peers.
Main Take-Aways
The learning experience with a placemat instruction includes students asking questions, carrying out their own ideas, interpreting data, and finally, creating their own solution to the given problem, all of which exemplify three-dimensional learning. What we take away from this experience is the power of designing with solution diversity in mind. The placemat instructions were intended to support and inspire students to generate their own ideas and be creative, which in turn afforded engagement in engineering practices. This was even evident in the students’ reflections such as: “With the [step-by-step] instructions, it’s a little harder to use your imagination because you’re told to do something.” We hope that sharing placemat instructions as a new type of instruction can be useful for educators looking for new ways to bring robotics into their classroom. Moving forward, we plan to keep developing our library of placemat instructions to contain a wider variety of challenges and robotics technologies.
We would like to thank the students and teachers who have made placemat instruction research and development possible, as well as LEGO Education for their thoughtful insights and SPIKE Prime sets. This work was supported by the National Science Foundation grant number A451001 SF9018.
Online Resources
LEGO Education Lesson Plans for SPIKE Prime: https://education.lego.com/en-us/lessons?products=SPIKE%E2%84%A2+Prime+Set
Placemat Instructions Library: www.ceeoinnovations.org/RoboticsPlayground/index.html
Sara Willner-Giwerc (sarawillnergiwerc@gmail.com) is a part-time lecturer in mechanical engineering, Rachel Hsin is an undergraduate student in mechanical engineering, Sonia Mody is an undergraduate student in human factors engineering, and Chris Rogers is the John R. Beaver Professor in Mechanical Engineering, all at Tufts University in Medford, Massachusetts.
Engineering Makerspace NGSS Technology